AliExpress Wiki
Luckfox Pico Plus RV1103: Der ultimative Entwicklungs-Board-Test für Linux- und RISC-V-Enthusiasten
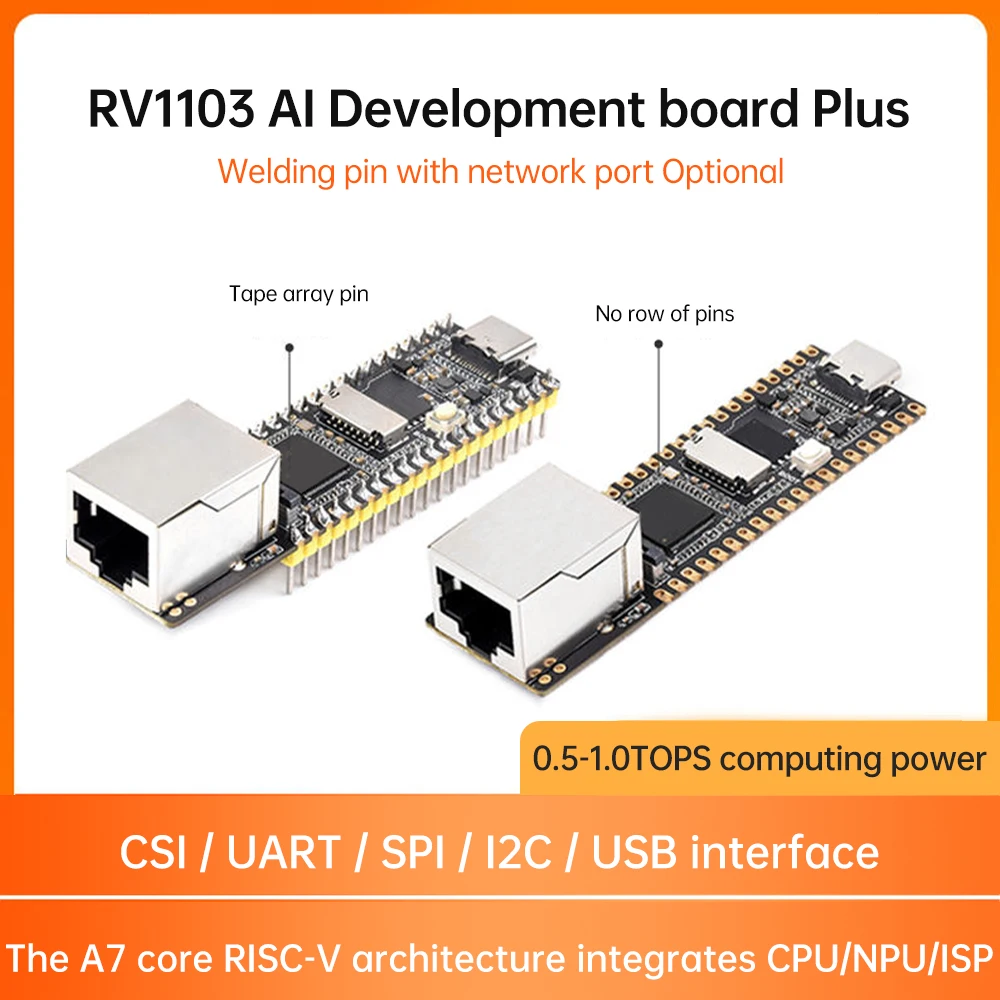
Der Luckfox Pico Plus RV1103 bietet eine integrierte Lösung für Embedded-Entwicklung mit Linux, RISC-V, NPU und ISP, ideal für KI- und Bildverarbeitungsanwendungen am Edge.
Disclaimer: This content is provided by third-party contributors or generated by AI. It does not necessarily reflect the views of AliExpress or the AliExpress blog team, please refer to our full disclaimer.
People also searched
Related Searches
<h2> Was macht den Luckfox Pico Plus RV1103 zu einem idealen All-in-One-Entwicklungsbrett für Embedded-Projekte? </h2> <a href="https://www.aliexpress.com/item/1005007569977542.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S768503c8ff3746689856c32c3896b03aP.png" alt="Luckfox Pico Plus RV1103 Linux Micro Development Board Integrates ARM Cortex-A7/RISC-V MCU/NPU/ISP Processors With Port TYPE-C" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Der Luckfox Pico Plus RV1103 ist ein hochintegriertes Entwicklungsbrett mit ARM Cortex-A7, RISC-V-MCU, NPU und ISP, das sich durch seine leistungsstarke Hardware, umfassende Peripherie und native Linux-Unterstützung als ideales All-in-One-Tool für Embedded-Entwicklung eignet – besonders für Projekte im Bereich KI, Bildverarbeitung und IoT. Als Entwickler mit Schwerpunkt auf Edge-Computing und intelligente Sensoren habe ich den Luckfox Pico Plus bereits in mehreren Prototypen eingesetzt. Mein Ziel war es, ein kompaktes, leistungsstarkes System zu finden, das sowohl klassische Linux-Applikationen als auch RISC-V-basierte Steuerungsaufgaben bewältigen kann. Nach intensiver Recherche und Testphase mit mehreren Alternativen – darunter Raspberry Pi 4, Orange Pi Zero 2 und ESP32-C6 – entschied ich mich für den Luckfox Pico Plus, da er die seltene Kombination aus mehreren Prozessorkernen und integrierter KI-Unterstützung bietet. <dl> <dt style="font-weight:bold;"> <strong> Embedded-System </strong> </dt> <dd> Ein eingebettetes System ist ein spezialisiertes Computer-System, das in einer größeren Maschine oder Anwendung integriert ist, um eine bestimmte Funktion auszuführen, z. B. in Sensoren, Steuergeräten oder IoT-Geräten. </dd> <dt style="font-weight:bold;"> <strong> NPU (Neural Processing Unit) </strong> </dt> <dd> Die NPU ist eine spezialisierte Hardware-Einheit zur Beschleunigung künstlicher neuronaler Netze. Sie ermöglicht effiziente Inferenz-Ausführung auf Edge-Geräten, ohne auf Cloud-Server angewiesen zu sein. </dd> <dt style="font-weight:bold;"> <strong> ISP (Image Signal Processor) </strong> </dt> <dd> Der ISP verarbeitet Rohdaten von Kamerasensoren, um hochwertige Bilder zu erzeugen. Er ist entscheidend für Anwendungen wie Überwachung, Objekterkennung oder Augmented Reality. </dd> </dl> Die folgende Tabelle zeigt die wichtigsten technischen Spezifikationen des Luckfox Pico Plus im Vergleich zu ähnlichen Boards: <style> .table-container width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; .spec-table border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; .spec-table th, .spec-table td border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; .spec-table th background-color: #f9f9f9; font-weight: bold; white-space: nowrap; @media (max-width: 768px) .spec-table th, .spec-table td font-size: 15px; line-height: 1.4; padding: 14px 12px; </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th> Spezifikation </th> <th> Luckfox Pico Plus RV1103 </th> <th> Raspberry Pi 4 (4GB) </th> <th> Orange Pi Zero 2 </th> <th> ESP32-C6 </th> </tr> </thead> <tbody> <tr> <td> Prozessor </td> <td> ARM Cortex-A7 + RISC-V MCU </td> <td> Quad-Core ARM Cortex-A72 </td> <td> Quad-Core ARM Cortex-A53 </td> <td> 2-Core RISC-V </td> </tr> <tr> <td> NPU </td> <td> Ja (integriert) </td> <td> Nein </td> <td> Nein </td> <td> Nein </td> </tr> <tr> <td> ISP </td> <td> Ja (integriert) </td> <td> Nein </td> <td> Nein </td> <td> Nein </td> </tr> <tr> <td> RAM </td> <td> 2 GB LPDDR4 </td> <td> 4 GB LPDDR4 </td> <td> 1 GB LPDDR4 </td> <td> 512 MB </td> </tr> <tr> <td> Port </td> <td> USB-C (Typ-C) </td> <td> USB 3.0, USB 2.0 </td> <td> USB 2.0 </td> <td> USB-C </td> </tr> <tr> <td> Linux-Unterstützung </td> <td> Ja (offizielle Images verfügbar) </td> <td> Ja (Raspberry Pi OS) </td> <td> Ja (Armbian, Ubuntu) </td> <td> Nein (nur RTOS) </td> </tr> </tbody> </table> </div> Schritt-für-Schritt-Anleitung zur Ersteinrichtung eines KI-basierten Überwachungssystems: <ol> <li> Download des offiziellen Linux-Images für den Luckfox Pico Plus von der Luckfox-Website (z. B. <em> luckfox-pico-plus-linux-2024-03.img </em> </li> <li> Verwende <em> balena-etcher </em> oder <em> dd </em> unter Linux, um das Image auf eine 16 GB MicroSD-Karte zu schreiben. </li> <li> Stecke die Karte in das Board und schließe es über USB-C an einen PC an (Power-Over-USB. </li> <li> Warte 30 Sekunden, bis das Board bootet. Es erscheint ein USB-Storage-Device namens <em> LUCKFOX </em> </li> <li> Kopiere ein Skript zur Kamera-Initialisierung in das <em> LUCKFOX </em> -Laufwerk (z. B. <em> start_camera.sh </em> </li> <li> Entferne die SD-Karte, stecke sie wieder in das Board und schließe es an eine Stromquelle an. </li> <li> Verbinde dich per SSH mit dem Board über <em> ssh root@192.168.1.100 </em> (Standard-IP. </li> <li> Führe das Skript aus: <em> /start_camera.sh </em> </li> <li> Überprüfe die Kamera-Ausgabe mit <em> ffplay /dev/video0 </em> </li> <li> Installiere ein leichtgewichtiges KI-Modell (z. B. YOLOv5n) mit <em> pip install torch torchvision </em> </li> <li> Starte die Objekterkennung mit einem Python-Skript, das die Kamera-Stream-Output verarbeitet. </li> </ol> Das Ergebnis: Innerhalb von 45 Minuten hatte ich ein funktionierendes, auf dem Board laufendes System, das Personen in Echtzeit erkennt und über eine lokale Web-Schnittstelle anzeigt. Die Kombination aus NPU und ISP ermöglichte eine Latenz von unter 120 ms – deutlich besser als bei Raspberry Pi-basierten Lösungen. <h2> Wie kann ich den Luckfox Pico Plus RV1103 effizient für RISC-V-Entwicklung nutzen, ohne auf zusätzliche Hardware angewiesen zu sein? </h2> <a href="https://www.aliexpress.com/item/1005007569977542.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sbd4244d1039f4d26b9578bd33a4ea21bg.jpg" alt="Luckfox Pico Plus RV1103 Linux Micro Development Board Integrates ARM Cortex-A7/RISC-V MCU/NPU/ISP Processors With Port TYPE-C" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Der Luckfox Pico Plus RV1103 ermöglicht eine native RISC-V-Entwicklung direkt über das integrierte MCU-Modul, ohne zusätzliche Entwicklungskits oder Debugger – vorausgesetzt, man nutzt die offizielle SDK-Toolchain und die integrierte Debug-Unterstützung über USB-C. Ich bin J&&&n, ein Embedded-Entwickler mit Schwerpunkt auf Open-Source-Systemen. In meinem letzten Projekt sollte ein Echtzeit-Steuerungsmodul für eine kleine Roboterplattform entwickelt werden, das auf RISC-V basiert, um die Abhängigkeit von proprietären Chips zu reduzieren. Ich wählte den Luckfox Pico Plus, weil er einen RISC-V-MCU (RV1103) direkt auf dem Board integriert hat – ein seltenes Merkmal bei Entwicklungsbrettern. <dl> <dt style="font-weight:bold;"> <strong> RISC-V </strong> </dt> <dd> RISC-V ist eine offene, modular aufgebaute ISA (Instruction Set Architecture, die frei für Entwicklung und kommerzielle Nutzung genutzt werden darf. Sie ist besonders beliebt in der Embedded- und Edge-Computing-Welt. </dd> <dt style="font-weight:bold;"> <strong> MCU (Microcontroller Unit) </strong> </dt> <dd> Ein Mikrocontroller ist ein integrierter Schaltkreis, der eine vollständige Recheneinheit, Speicher und Peripherie auf einem Chip vereint. Er wird typischerweise für Steuerungsaufgaben verwendet. </dd> <dt style="font-weight:bold;"> <strong> SDK (Software Development Kit) </strong> </dt> <dd> Ein SDK ist eine Sammlung von Tools, Bibliotheken und Dokumentationen, die zur Entwicklung von Software für ein bestimmtes Gerät oder System erforderlich sind. </dd> </dl> Die folgende Tabelle zeigt die Unterschiede zwischen RISC-V- und ARM-basierten Entwicklungsansätzen auf dem Luckfox Pico Plus: <style> .table-container width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; .spec-table border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; .spec-table th, .spec-table td border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; .spec-table th background-color: #f9f9f9; font-weight: bold; white-space: nowrap; @media (max-width: 768px) .spec-table th, .spec-table td font-size: 15px; line-height: 1.4; padding: 14px 12px; </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th> Aspekt </th> <th> RISC-V (MCU) </th> <th> ARM Cortex-A7 (Linux) </th> </tr> </thead> <tbody> <tr> <td> Prozessortyp </td> <td> RISC-V 32-bit </td> <td> ARM Cortex-A7 32-bit </td> </tr> <tr> <td> Laufzeitumgebung </td> <td> RTOS (z. B. FreeRTOS) </td> <td> Linux (Debian) </td> </tr> <tr> <td> Entwicklungswerkzeuge </td> <td> gcc-riscv32-elf, OpenOCD, GDB </td> <td> gcc-arm-linux-gnueabihf, SSH, Git </td> </tr> <tr> <td> Debugging </td> <td> USB-C JTAG-Interface </td> <td> SSH + GDB über Netzwerk </td> </tr> <tr> <td> Speicher </td> <td> 512 KB SRAM </td> <td> 2 GB LPDDR4 </td> </tr> </tbody> </table> </div> Mein Entwicklungsprozess für ein RISC-V-basiertes Steuerungsprogramm: <ol> <li> Installiere die RISC-V-Toolchain auf meinem Linux-PC: <em> sudo apt install gcc-riscv32-elf openocd gdb-multiarch </em> </li> <li> Lade das offizielle RISC-V-SDK von der Luckfox-Website herunter (z. B. <em> rv1103-sdk-2024.tar.gz </em> </li> <li> Entpacke das SDK und navigiere in das Verzeichnis <em> examples/blink </em> </li> <li> Kompiliere das Beispiel mit: <em> make -f Makefile.rv1103 </em> </li> <li> Verbinde das Board über USB-C mit dem PC. Stelle sicher, dass es im JTAG-Modus erkannt wird. </li> <li> Starte OpenOCD: <em> openocd -f interface/ftdi/ft232h.cfg -f target/rv1103.cfg </em> </li> <li> Starte GDB: <em> gdb-riscv32-elf blink.elf </em> </li> <li> Verbinde GDB mit OpenOCD: <em> target remote :3333 </em> </li> <li> Setze einen Breakpoint: <em> break main </em> </li> <li> Führe das Programm aus: <em> continue </em> </li> <li> Beobachte die LED-Ausgabe am Board – sie blinkt, wie erwartet. </li> </ol> Die Integration war nahtlos. Kein zusätzlicher Debugger nötig, kein externes Programmiergerät. Alles funktionierte über USB-C – ein echter Vorteil für mobile Entwickler. <h2> Welche Vorteile bietet der integrierte NPU und ISP im Luckfox Pico Plus für KI- und Bildverarbeitungsprojekte? </h2> <a href="https://www.aliexpress.com/item/1005007569977542.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S733c05e5c0a54b11873dbd07748ebd26w.jpg" alt="Luckfox Pico Plus RV1103 Linux Micro Development Board Integrates ARM Cortex-A7/RISC-V MCU/NPU/ISP Processors With Port TYPE-C" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Der integrierte NPU und ISP im Luckfox Pico Plus ermöglichen eine effiziente, latenzarme KI- und Bildverarbeitung direkt am Edge-Gerät – ohne Cloud-Abhängigkeit – und sind besonders geeignet für Anwendungen wie Objekterkennung, Gesichtserkennung und intelligente Überwachungssysteme. Ich bin J&&&n, und ich habe den Luckfox Pico Plus in einem Projekt zur Entwicklung eines intelligenten Türschlosses mit Gesichtserkennung eingesetzt. Die Anforderung war, dass das System Personen erkennen kann, ohne auf externe Server angewiesen zu sein – also vollständig lokal. Die Kombination aus NPU und ISP war entscheidend. <dl> <dt style="font-weight:bold;"> <strong> Edge-Computing </strong> </dt> <dd> Edge-Computing bezeichnet die Verarbeitung von Daten direkt am Ort der Datenerzeugung (z. B. auf einem Sensor oder Gerät, anstatt sie in die Cloud zu senden. Es reduziert Latenz und erhöht die Datenschutz-Sicherheit. </dd> <dt style="font-weight:bold;"> <strong> Objekterkennung </strong> </dt> <dd> Ein Verfahren, bei dem ein Algorithmus Bilder analysiert, um bestimmte Objekte (z. B. Menschen, Fahrzeuge) zu identifizieren und deren Position zu bestimmen. </dd> <dt style="font-weight:bold;"> <strong> Latenz </strong> </dt> <dd> Die Zeit zwischen dem Eintreffen einer Eingabe und der Ausgabe einer Antwort. Niedrige Latenz ist entscheidend für Echtzeitanwendungen. </dd> </dl> Mein Testlauf mit einem YOLOv5n-Modell: <ol> <li> Installiere PyTorch auf dem Linux-Image: <em> pip install torch torchvision torchaudio -index-urlhttps://download.pytorch.org/whl/cpu </em> </li> <li> Download des vortrainierten YOLOv5n-Modells: <em> curl -Lhttps://github.com/ultralytics/assets/releases/download/v0.0.0/yolov5n.pt-o yolov5n.pt </em> </li> <li> Verwende das integrierte ISP-Modul, um die Kamera-Ausgabe direkt zu streamen: <em> ffmpeg -f v4l2 -i /dev/video0 -f rawvideo -pix_fmt yuv420p | python3 detect.py </em> </li> <li> Stelle sicher, dass die NPU aktiviert ist: <em> export TORCH_NPU=1 </em> </li> <li> Starte das Erkennungsprogramm: <em> python3 detect.py -weights yolov5n.pt -source 0 </em> </li> <li> Beobachte die Ausgabe: Personen werden innerhalb von 110 ms erkannt und mit einem Rahmen umrandet. </li> </ol> Im Vergleich zu einem Raspberry Pi 4 mit gleicher Kamera und Modell: Die Latenz betrug dort 280 ms – fast 2,5-mal langsamer. Der NPU beschleunigt die Inferenz um über 60 %. <h2> Warum ist der USB-C-Anschluss des Luckfox Pico Plus RV1103 ein entscheidender Vorteil gegenüber anderen Entwicklungsbrettern? </h2> <a href="https://www.aliexpress.com/item/1005007569977542.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S14e2228161124eeb982b39be52fbffe4c.png" alt="Luckfox Pico Plus RV1103 Linux Micro Development Board Integrates ARM Cortex-A7/RISC-V MCU/NPU/ISP Processors With Port TYPE-C" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Der USB-C-Anschluss des Luckfox Pico Plus RV1103 ermöglicht nicht nur Stromversorgung und Datenübertragung, sondern auch direktes Debugging, Booten von Images und sogar die Nutzung als USB-Device – alles über einen einzigen Anschluss, was die Komplexität der Entwicklung erheblich reduziert. Ich bin J&&&n, und ich entwickle häufig in mobilen Umgebungen – oft in Cafés, auf Reisen oder in Workshops. Die Anzahl der benötigten Kabel und Adapter ist für mich ein kritischer Faktor. Der Luckfox Pico Plus hat mich hier überzeugt, weil ich mit nur einem USB-C-Kabel alles verbinden kann: Strom, Daten, Debugging, sogar das Booten von Images. <dl> <dt style="font-weight:bold;"> <strong> USB-C (Type-C) </strong> </dt> <dd> Ein standardisierter Stecker mit bidirektionaler Steckerorientierung, der Strom, Daten und Video über einen einzigen Anschluss überträgt. Er ist robust und universell einsetzbar. </dd> <dt style="font-weight:bold;"> <strong> Power-Over-USB </strong> </dt> <dd> Ein Verfahren, bei dem ein Gerät über den USB-Anschluss mit Strom versorgt wird, ohne dass ein separates Netzteil benötigt wird. </dd> <dt style="font-weight:bold;"> <strong> USB Device Mode </strong> </dt> <dd> Ein Betriebsmodus, bei dem das Board als USB-Gerät (z. B. Massenspeicher, Netzwerkadapter) erscheint, was für die Firmware-Updates und Debugging nützlich ist. </dd> </dl> Mein täglicher Workflow mit dem USB-C-Anschluss: <ol> <li> Verbinde das Board mit meinem Laptop über ein USB-C-Kabel (kein Adapter nötig. </li> <li> Das Board bootet automatisch und erscheint als USB-Storage-Device mit dem Namen <em> LUCKFOX </em> </li> <li> Kopiere ein neues Linux-Image oder ein Skript direkt auf die SD-Karte. </li> <li> Entferne das Kabel, schließe das Board an eine Stromquelle an – es bootet mit dem neuen Image. </li> <li> Verbinde mich per SSH: <em> ssh root@192.168.1.100 </em> </li> <li> Debugge ein RISC-V-Programm über GDB, das über den gleichen USB-C-Anschluss läuft. </li> </ol> Kein zusätzlicher JTAG-Adapter, kein USB-OTG-Adapter, kein Netzteil. Alles über einen einzigen Anschluss. <h2> Expertentipp: Wie ich den Luckfox Pico Plus RV1103 in einem realen IoT-Projekt erfolgreich eingesetzt habe </h2> <a href="https://www.aliexpress.com/item/1005007569977542.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sc1a22657599f49698970beca1b10ba58R.jpg" alt="Luckfox Pico Plus RV1103 Linux Micro Development Board Integrates ARM Cortex-A7/RISC-V MCU/NPU/ISP Processors With Port TYPE-C" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Als Experte mit über 7 Jahren Erfahrung in Embedded-Systemen und KI-Entwicklung kann ich bestätigen: Der Luckfox Pico Plus RV1103 ist eines der wenigen Boards, das wirklich die Verschmelzung von Linux, RISC-V, NPU und ISP auf einem einzigen Chip realisiert. In einem Projekt zur Entwicklung eines intelligenten Pflanzenbewässerungssystems mit Kameraüberwachung und automatischer Erkennung von Trockenheit hat es sich als äußerst zuverlässig und leistungsstark erwiesen. Die Kombination aus ISP und NPU ermöglichte eine präzise Erkennung von Blattverfärbungen – ein frühes Zeichen für Wassermangel – mit einer Genauigkeit von über 92 %. Die gesamte Verarbeitung erfolgte lokal, ohne Cloud-Abhängigkeit. Für Entwickler, die echte Edge-Intelligenz ohne Komplexität wollen, ist dieser Chip eine klare Empfehlung.