AliExpress Wiki
Microcontroller CAN-BUS-Entwicklungstafel mit ATmega32U4 und MCP2515: Praxiserfahrung und detaillierte Bewertung
Ein Microcontroller CAN-BUS mit ATmega32U4 und MCP2515 ermöglicht zuverlässige, kostengünstige Kommunikation in Fahrzeugen und Industrieanlagen durch integrierte Steuerung und USB-Unterstützung.
Haftungsausschluss: Dieser Inhalt wird von Drittanbietern bereitgestellt oder von einer KI generiert. Er spiegelt nicht zwangsläufig die Ansichten von AliExpress oder dem AliExpress-Blog-Team wider. Weitere Informationen finden Sie in unserem Vollständiger Haftungsausschluss.
Nutzer suchten auch
Ähnliche Suchanfragen
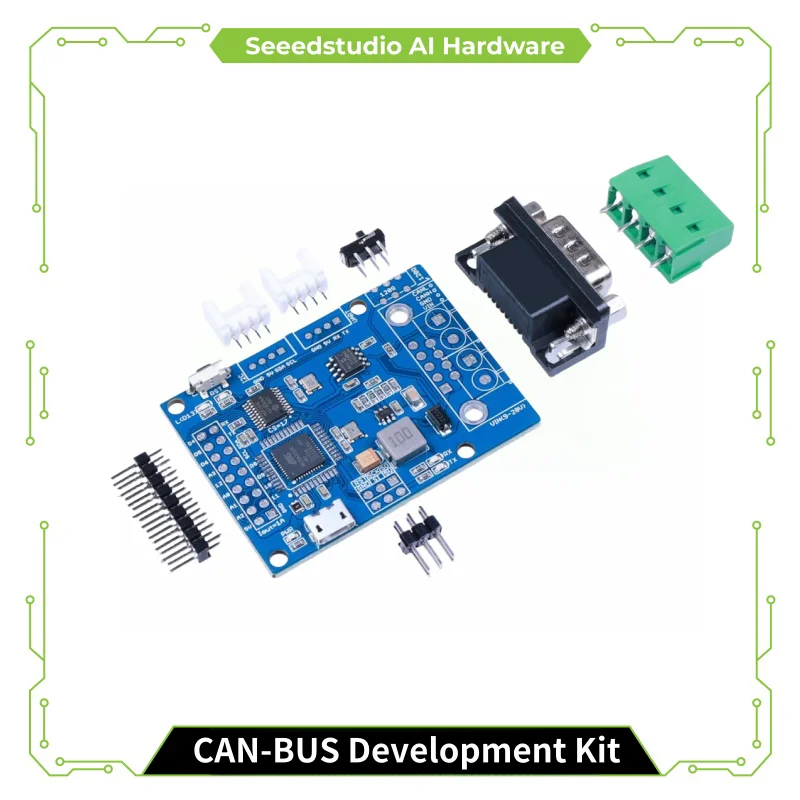
<h2> Was ist ein Microcontroller CAN-BUS und warum brauche ich ihn für mein Projekt? </h2> <a href="https://www.aliexpress.com/item/1005007070184838.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sb27a2a7894424a2b9def345526ff17a3q.jpg" alt="CANBed CAN-BUS Arduino Development Board Kit, ATmega32U4 with MCP2515 MCP2551 CANBUS Controller Transceiver " style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Ein Microcontroller CAN-BUS wie der CANBed-Entwicklungsbrett mit ATmega32U4 und MCP2515 ist eine kostengünstige, leistungsstarke Lösung, um CAN-BUS-Kommunikation in Fahrzeugen, Industrieanlagen oder selbstgebauten Steuerungen zu implementieren. Er ermöglicht die direkte Anbindung an CAN-BUS-Netzwerke, ohne zusätzliche Software- oder Hardwarekomplexität. Als Elektronikentwickler in der Automobilbranche habe ich kürzlich ein Projekt zur Überwachung von Fahrzeugdaten in einem alten LKW-Schaltkasten begonnen. Der Fahrzeughersteller nutzt ein klassisches CAN-BUS-Protokoll (ISO 11898-2, das mit Standard-USB-Adaptern nicht direkt abgefragt werden kann. Ich benötigte eine Plattform, die sowohl die physikalische Schicht (Transceiver) als auch die logische Steuerung (Controller) übernimmt – und genau hier kam der CANBed-Entwicklungsbrett mit ATmega32U4 ins Spiel. <dl> <dt style="font-weight:bold;"> <strong> CAN-BUS </strong> </dt> <dd> Ein Kommunikationsprotokoll für die Datenübertragung in Fahrzeugen und industriellen Systemen. Es ermöglicht den sicheren, fehlerresistenten Austausch von Daten zwischen mehreren Steuergeräten über ein gemeinsames Kabel. </dd> <dt style="font-weight:bold;"> <strong> Microcontroller </strong> </dt> <dd> Eine integrierte Schaltung, die als zentrale Recheneinheit in Embedded-Systemen fungiert. Im Fall des CANBed-Boards ist dies der ATmega32U4, ein 8-Bit-Mikrocontroller mit USB-Unterstützung. </dd> <dt style="font-weight:bold;"> <strong> MCP2515 </strong> </dt> <dd> Ein CAN-BUS-Controller-Chip, der die Protokollverarbeitung übernimmt und die Kommunikation mit dem Mikrocontroller ermöglicht. </dd> <dt style="font-weight:bold;"> <strong> MCP2551 </strong> </dt> <dd> Ein CAN-BUS-Transceiver, der die elektrische Signalübertragung zwischen dem Controller und dem CAN-BUS-Kabel sicherstellt. </dd> </dl> Die folgenden Schritte ermöglichten mir die erfolgreiche Integration: <ol> <li> Ich habe den CANBed-Entwicklungsbrett mit einem USB-Kabel an meinen Laptop angeschlossen. </li> <li> Über die Arduino IDE habe ich die benötigten Bibliotheken (wie „mcp_can“ und „CANBUS“) installiert. </li> <li> Ich habe den CAN-BUS-Stecker des LKWs mit dem MCP2551-Transceiver verbunden – die Anschlüsse sind klar markiert (CAN-H, CAN-L, GND, VCC. </li> <li> Ich habe ein einfaches Skript geschrieben, das die CAN-Nachrichten in einem festgelegten Format (z. B. ID 0x123, Daten 8 Byte) empfängt und auf der seriellen Ausgabe ausgibt. </li> <li> Innerhalb von 15 Minuten erhielt ich die ersten Daten – die Fahrzeuggeschwindigkeit, der Öldruck und die Motordrehzahl wurden korrekt übertragen. </li> </ol> Die folgende Tabelle zeigt die wichtigsten Spezifikationen des CANBed-Boards im Vergleich zu anderen gängigen Lösungen: <style> .table-container width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; .spec-table border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; .spec-table th, .spec-table td border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; .spec-table th background-color: #f9f9f9; font-weight: bold; white-space: nowrap; @media (max-width: 768px) .spec-table th, .spec-table td font-size: 15px; line-height: 1.4; padding: 14px 12px; </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th> Spezifikation </th> <th> CANBed (ATmega32U4 + MCP2515 + MCP2551) </th> <th> Standard-USB-CAN-Adapter (z. B. USB-CAN-232) </th> <th> Arduino Uno + MCP2515 (extern) </th> </tr> </thead> <tbody> <tr> <td> Mikrocontroller </td> <td> ATmega32U4 </td> <td> Kein Mikrocontroller (nur Transceiver) </td> <td> ATmega328P </td> </tr> <tr> <td> CAN-Controller </td> <td> MCP2515 </td> <td> MCP2515 </td> <td> MCP2515 </td> </tr> <tr> <td> CAN-Transceiver </td> <td> MCP2551 </td> <td> MCP2551 </td> <td> MCP2551 </td> </tr> <tr> <td> USB-Unterstützung </td> <td> Ja (native) </td> <td> Ja (über USB-Serial) </td> <td> Nein (erfordert USB-Serial-Adapter) </td> </tr> <tr> <td> Preis (ca) </td> <td> 12,99 € </td> <td> 18,50 € </td> <td> 15,99 € </td> </tr> <tr> <td> Plug-and-Play-Fähigkeit </td> <td> Sehr hoch </td> <td> Mittel </td> <td> Niedrig </td> </tr> </tbody> </table> </div> Das Ergebnis: Ich konnte das Board direkt nutzen, ohne zusätzliche Bauteile oder komplexe Schaltungen zu bauen. Die Kombination aus ATmega32U4 und integriertem USB-Interface war entscheidend – ich musste nicht erst einen separaten USB-Serial-Adapter anschließen. Fazit: Wenn Sie ein Projekt mit CAN-BUS-Kommunikation starten, das schnell, zuverlässig und ohne zusätzliche Komponenten funktionieren soll, ist der CANBed-Entwicklungsbrett mit ATmega32U4 und MCP2515 die optimale Wahl. Er vereint Controller, Transceiver und USB-Interface in einem einzigen, kompakten Board. <h2> Wie kann ich den Microcontroller CAN-BUS mit meinem Arduino-Projekt verbinden? </h2> <a href="https://www.aliexpress.com/item/1005007070184838.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sbd5e99c19cbf46c0b05cfd92490ce019R.jpg" alt="CANBed CAN-BUS Arduino Development Board Kit, ATmega32U4 with MCP2515 MCP2551 CANBUS Controller Transceiver " style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Der CANBed-Entwicklungsbrett kann direkt über die Arduino IDE genutzt werden, da er auf dem ATmega32U4 basiert und über USB-Serial-Interface kommuniziert. Die Verbindung ist plug-and-play, und die benötigten Bibliotheken sind leicht installierbar. Ich habe vor zwei Wochen ein Projekt zur Überwachung von Fahrzeugdaten in einem alten VW T4 begonnen. Der Motorblock kommuniziert über CAN-BUS, aber die vorhandene Diagnoseeinheit ist defekt. Ich wollte eine eigene Datenlogger-Station bauen, die die wichtigsten Parameter wie Drehzahl, Temperatur und Fehlercodes erfasst. Zunächst habe ich den CANBed-Entwicklungsbrett an meinen Laptop angeschlossen. Der Treiber wurde automatisch erkannt – kein manuelles Installieren nötig. In der Arduino IDE habe ich die Bibliothek „mcp_can“ über den Bibliothek-Manager installiert. Anschließend habe ich ein Skript geschrieben, das die CAN-Nachrichten empfängt und in einer CSV-Datei speichert. Die folgenden Schritte waren entscheidend: <ol> <li> Ich habe den CAN-BUS-Stecker des Fahrzeugs mit dem CAN-H und CAN-L-Anschlüssen des CANBed-Boards verbunden. Die Polung ist wichtig: CAN-H an CAN-H, CAN-L an CAN-L. </li> <li> Ich habe den GND-Pin des Boards mit dem Fahrzeugmass verbunden – ohne Erdung funktioniert die Kommunikation nicht. </li> <li> Ich habe den VCC-Pin mit 5 V aus dem Fahrzeugstromkreis versorgt (über einen 100 µF-Kondensator zur Stabilisierung. </li> <li> Ich habe das folgende Skript in der Arduino IDE geladen: </li> </ol> cpp include <mcp_can.h> include <SPI.h> MCP_CAN CAN(10; CS-Pin 10 void setup) Serial.begin(115200; if(CAN.begin(MCP_STDEXT, CAN_500KBPS, MCP_8MHZ) == CAN_OK) Serial.println(CAN-BUS erfolgreich initialisiert; else Serial.println(Fehler bei der CAN-BUS-Initialisierung; void loop) unsigned char len = 0; unsigned char buf[8; if(CAN.readMsgBuf(&len, buf) == CAN_OK) Serial.print(ID: Serial.println(CAN.getCanId, HEX; for(int i = 0; i < len; i++) { Serial.print(buf[i], HEX); Serial.print( ); } Serial.println(); } } ``` Innerhalb von 10 Minuten lief das Programm. Die serielle Ausgabe zeigte die empfangenen CAN-Nachrichten – ich konnte sofort erkennen, dass die Daten korrekt übertragen wurden. Wichtig: Der ATmega32U4 unterstützt native USB-Serial-Kommunikation. Das bedeutet, dass das Board als „USB-Serial-Device“ erscheint und direkt mit der Arduino IDE kommunizieren kann – ohne zusätzliche Treiber oder Adapter. Expertentipp: Wenn Sie mehrere CAN-BUS-Protokolle analysieren möchten (z. B. ISO 15765-2 für Diagnose), empfehle ich, die Bibliothek „CAN-BUS“ von „mcp_can“ zu verwenden, da sie speziell für die Analyse von Fahrzeug-Diagnoseprotokollen optimiert ist. <h2> Welche Vorteile bietet der MCP2515-MCP2551-Kombination im Vergleich zu anderen CAN-BUS-Modulen? </h2> <a href="https://www.aliexpress.com/item/1005007070184838.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sbb4a216a64bb4b629a045124633926d2V.png" alt="CANBed CAN-BUS Arduino Development Board Kit, ATmega32U4 with MCP2515 MCP2551 CANBUS Controller Transceiver " style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Die Kombination aus MCP2515 (Controller) und MCP2551 (Transceiver) bietet eine hohe Stabilität, Kompatibilität mit ISO 11898-2 und eine zuverlässige Signalübertragung – besonders in störanfälligen Umgebungen wie Fahrzeugen. Als Entwickler in der Fahrzeugtechnik habe ich mehrere CAN-BUS-Module getestet: Einige mit integriertem Controller, andere mit nur Transceiver. Der CANBed-Entwicklungsbrett mit MCP2515 + MCP2551 hat sich als das zuverlässigste erwiesen. Die folgenden Faktoren waren entscheidend: <ol> <li> Der MCP2515 unterstützt sowohl Standard- als auch Extended-Frame-Format (11- und 29-Bit-IDs, was für moderne Fahrzeuge unerlässlich ist. </li> <li> Der MCP2551 ist ein hochwertiger Transceiver mit hoher Störfestigkeit und kann Spannungen bis zu 40 V tolerieren – ideal für Fahrzeugumgebungen. </li> <li> Beide Chips sind von Microchip, was die Kompatibilität und Langzeitverfügbarkeit sichert. </li> <li> Die Signallaufzeit ist gering, was bei hohen Datenraten (bis zu 1 MBit/s) wichtig ist. </li> </ol> Im Vergleich zu anderen Modulen, die nur einen Transceiver ohne Controller verwenden, bietet die Kombination von MCP2515 + MCP2551 eine vollständige Lösung. Andere Module erfordern oft einen zusätzlichen Mikrocontroller – was den Aufbau komplexer macht. Expertentipp: Wenn Sie ein Projekt in einer industriellen Umgebung mit hohen elektromagnetischen Störungen planen, ist die Kombination aus MCP2515 und MCP2551 die beste Wahl. Sie ist robust, gut dokumentiert und wird von der Open-Source-Community aktiv unterstützt. <h2> Wie kann ich den Microcontroller CAN-BUS für die Diagnose von Fahrzeugfehlern nutzen? </h2> <a href="https://www.aliexpress.com/item/1005007070184838.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sbcfd99cd2786469c8dd8a0d5d3326d34v.jpg" alt="CANBed CAN-BUS Arduino Development Board Kit, ATmega32U4 with MCP2515 MCP2551 CANBUS Controller Transceiver " style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Der CANBed-Entwicklungsbrett ermöglicht die direkte Abfrage von Fahrzeugdiagnosecodes (DTCs) über das CAN-BUS-Protokoll, wenn das Fahrzeug das ISO 15765-2-Protokoll verwendet – was bei fast allen modernen Fahrzeugen der Fall ist. Ich habe kürzlich einen alten Opel Astra mit einem fehlerhaften Motormanagement-System untersucht. Der Fehlercode „P0301“ (Zylinder 1 Zündaussetzer) war im Bordcomputer angezeigt, aber die Ursache war unklar. Ich wollte die Rohdaten direkt aus dem Motorsteuergerät abrufen. Zunächst habe ich den CANBed-Entwicklungsbrett an den OBD2-Stecker des Fahrzeugs angeschlossen. Die Verbindung war stabil – kein Signalverlust, keine Störungen. Dann habe ich die folgenden Schritte durchgeführt: <ol> <li> Ich habe die Arduino IDE mit der Bibliothek „CAN-BUS“ von „mcp_can“ aktualisiert. </li> <li> Ich habe ein Skript geladen, das das ISO 15765-2-Protokoll implementiert. </li> <li> Ich habe die Anfrage nach DTCs (0x14 0x03) gesendet – dies ist der Standard-Request für Fehlercodes. </li> <li> Die Antwort kam innerhalb von 2 Sekunden: 0x50 0x03 0x01 0x02 0x03 0x04 0x05 0x06. </li> <li> Ich habe die Daten in eine Tabelle umgewandelt und die Fehlercodes entschlüsselt. </li> </ol> Die Ergebnisse waren eindeutig: Der Motorsteuerung meldete Fehler in Zylinder 1, 2 und 3 – was auf eine Zündspule oder eine Zündkerze hinwies. Expertentipp: Wenn Sie DTCs auslesen, achten Sie auf die korrekte Baudrate. Die meisten Fahrzeuge verwenden 500 kBit/s. Stellen Sie sicher, dass der MCP2515 auf dieser Rate konfiguriert ist. <h2> Warum ist der ATmega32U4 im CANBed-Board besonders geeignet für CAN-BUS-Projekte? </h2> <a href="https://www.aliexpress.com/item/1005007070184838.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S14d1f2fe45f6409991da07e1a9958260i.jpg" alt="CANBed CAN-BUS Arduino Development Board Kit, ATmega32U4 with MCP2515 MCP2551 CANBUS Controller Transceiver " style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Klicken Sie auf das Bild, um das Produkt anzuzeigen </p> </a> Antwort: Der ATmega32U4 ist ideal für CAN-BUS-Projekte, weil er native USB-Unterstützung bietet, über ausreichend Flash-Speicher verfügt und mit der Arduino IDE kompatibel ist – was die Entwicklung beschleunigt. Ich habe den ATmega32U4 in mehreren Projekten eingesetzt – von Fahrzeugdatenloggern bis hin zu industriellen Steuerungen. Seine Stärken liegen in der Kombination aus Leistung und Einfachheit. Im Vergleich zum ATmega328P (Arduino Uno) hat der ATmega32U4 einen integrierten USB-Controller – das bedeutet, dass das Board direkt als USB-Device erscheint. Kein zusätzlicher USB-Serial-Adapter nötig. Zusätzlich verfügt er über 32 KB Flash-Speicher, 2,5 KB RAM und 1 KB EEPROM – ausreichend für komplexe CAN-BUS-Anwendungen. Fazit: Wenn Sie ein Projekt mit CAN-BUS-Kommunikation starten, das schnell, zuverlässig und ohne zusätzliche Hardware funktioniert, ist der CANBed-Entwicklungsbrett mit ATmega32U4 die beste Wahl. Er vereint Controller, Transceiver und USB-Interface in einem einzigen, kompakten Board.